We participated in International Robot Exhibition 2015
We participated in International Robot Exhibition 2015, which was held at Tokyo Big Sight from December 2 to 5, 2015. Our booth was crowded with many visitors during the period and the event ended on a high note. Photos of our booth and the panels we used in the exhibition are presented below as a reference for those who did not visit the booth.
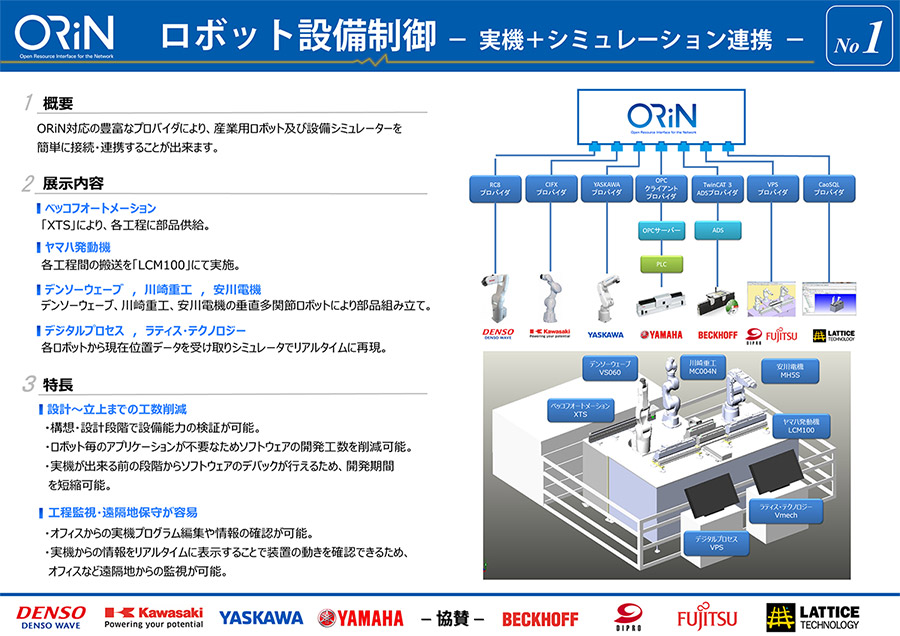
(1) Control of robot equipment (coordination of actual machines with simulations)Click each image to enlarge it
Industrial robots and equipment simulators can be connected and coordinated readily by using a wide variety of providers compatible with ORiN
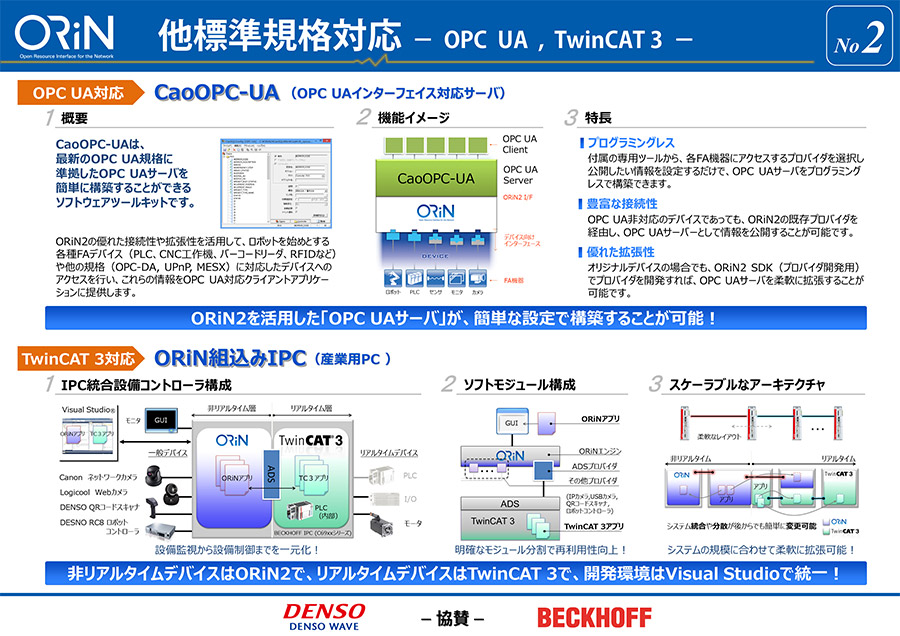
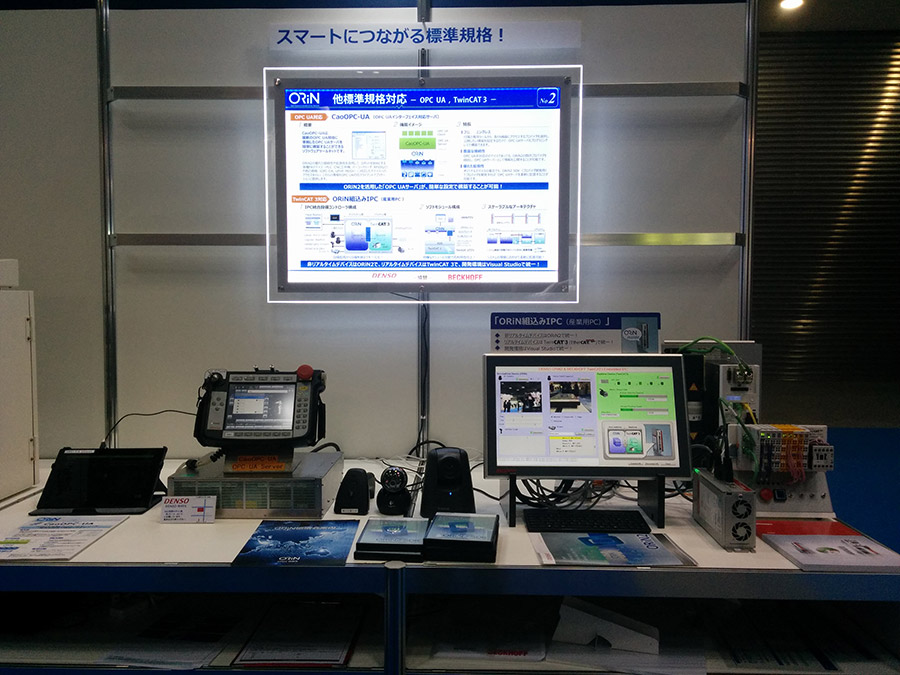
(2) Compatibility with other standards (OPC UA, TwinCAT3)Click each image to enlarge it
ORiN’s excellent connectivity and expandability enable access to devices compatible with other standards (OPC-DA, UPnP, MESX).
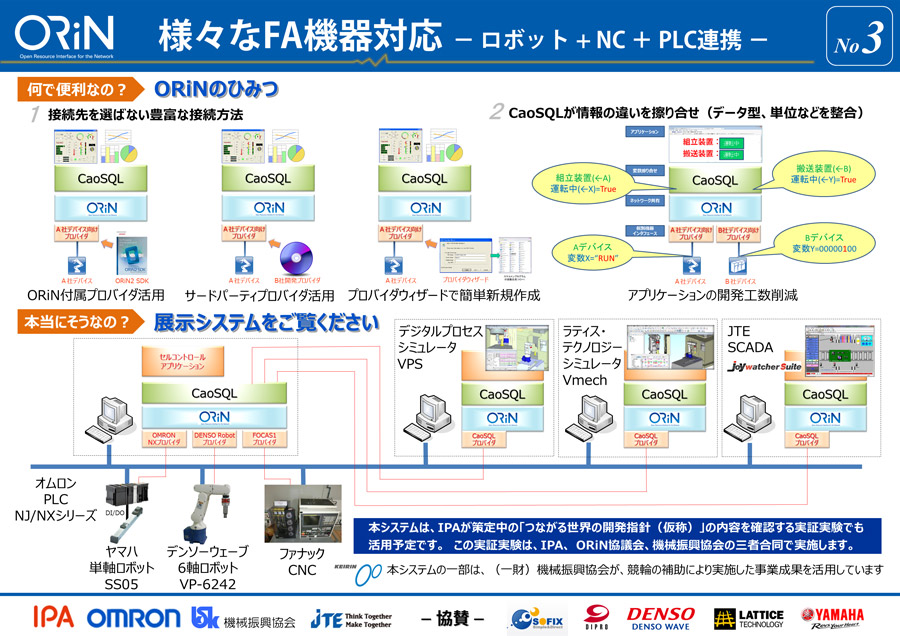
(3) Compatibility with various FA devices (coordination of robots, NC and PLC)Click each image to enlarge it
ORiN’s excellent connectivity and expandability enable access to robots and various other FA devices (PLC, CNC machine tools, barcode readers, RFID, etc.).
(4) Application to other fields (coordination with agriculture)Click each image to enlarge it
All information in a growing site can be managed in an integrated manner by sending and receiving messages with ORiN’s communication command and using providers for coordination with existing systems.


Compatibility with open sources (OSS) (b-CAP Library)Click each image to enlarge it
Devices compatible with ORiN can be accessed and controlled from various open sources by using socket communication specifications (b-CAP) of ORiN.

